|

by Nick Carne
March 21,
2019
from
CosmosMagazine Website
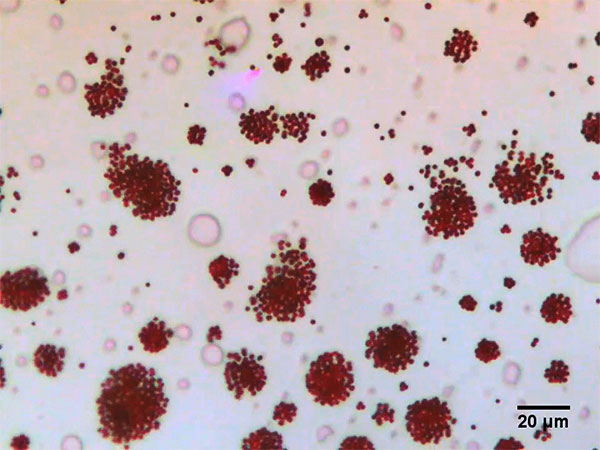
A vortex (circular crowds)
was one
of four different self-organized formations
the
magnetized micro-robots created.
Xie et al., Sci. Robot. 4, eaav8006 (2019)
for
animation click image...
Chinese research
shows tiny
mass-produced bots
can organize
collectively
depending on the
environment.
Scientists have demonstrated that
micro-robots of a single "species"
can shape-shift as a collective into various formations and organize
themselves to carry out diverse tasks in variable environments.
Unlike living species with a known ability to work together, such as
ants and fish, the bots don't have smarts to rely on sensory
function and communication.
The researchers had to
use external magnetic or electric fields to control them.
But even so, they exhibited enough versatility and multitasking
capability to suggest they could one day be used for inner-body
diagnostics or biomedical treatment at the cellular or molecular
level.
The research (Reconfigurable
Magnetic Micro-robot Swarm - Multimode Transformation, Locomotion,
and Manipulation) was led by Hue Xie from the
State Key Laboratory of Robotics and Systems at China's Harbin
Institute of Technology (HIT),
and reported in the journal Science Robotics.
Big advances with small robots are coming thick and fast.
Earlier this month, for
example, US researchers described how they
created a million of them in just a
few weeks using nanofabrication techniques borrowed from the
semiconductor industry.
However, as Xie and colleagues note in their paper,
"integrating drive
and sensing functions into micro- and nanoscale robots remains a
challenge",
...and you need to have
an awful lot of them working together to actually be of use, say,
inside a human body.
In their recent work they were able to program switchable
transformation behavior in a robotic swarm by regulating the
movement of each individual micro-robot.
By tuning the frequency
and direction of a rotating magnetic field, each individual
micro-robot - a peanut-shaped hematite particle - exhibited
oscillating, rolling, tumbling and spinning movements.
Depending on the type of individual movement, the robots as a group
self-organized into different formations of,
-
liquid (an evenly
distributed pattern of robots)
-
chains (robots
connected in long and parallel rows travelling by the short
end)
-
ribbon (rows of
robots travelling by the long end)
-
vortex (circular
crowds of robots), respectively
The researchers could
also change the swarm's speed and direction, by tweaking the applied
magnetic field.
The micro-robot collective accomplished a variety of tasks by
switching between conformations, for example,
using the "chain"
formation to cross narrow channels, then the "vortex" to lift
heavy loads.
Xie and colleagues say
their findings support and demonstrate the idea of achieving the
control of a variety of synthetic and living active matter via a
programmed external stimulus,
"thus increasing the
possibilities of emulating living systems by active matter".
"Moreover, the physical mechanisms that govern the dynamics of
out-of-equilibrium colloidal systems were carefully
investigated, which is helpful for achieving a better
understanding of the cooperative mechanisms and
self-organization phenomena that occur in active systems," they
write.
"This provides potential solutions for biomedical applications,
such as imaging and targeted drug delivery."
|